
🤖 สร้างหุ่นยนต์ Arduino 2 ล้อสำหรับมือใหม่
โปรเจกต์หุ่นยนต์ 2WD ที่ทำได้ภายใน 15 นาที! ⚡
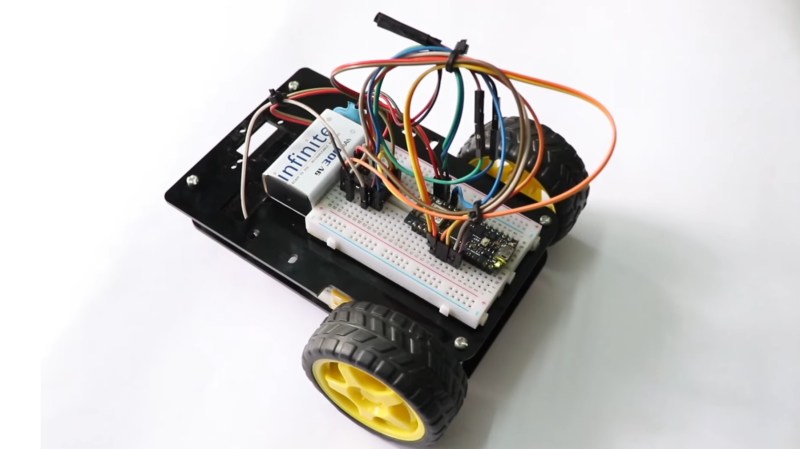
คุณสนใจทำหุ่นยนต์ด้วยตัวเอง แต่ไม่รู้จะเริ่มต้นยังไง? 🤔 วันนี้เรามีโปรเจกต์ดีๆ มาแนะนำ! นั่นคือ หุ่นยนต์ Arduino 2 ล้อ (Two-Wheeled Robot) ที่เหมาะสำหรับมือใหม่มากๆ ใช้เวลาประกอบแค่ 15 นาที ใช้อุปกรณ์ไม่กี่ชิ้น และเขียนโค้ดง่ายมาก! 🚀 หุ่นยนต์นี้สามารถเคลื่อนที่ไปข้างหน้า ถอยหลัง เลี้ยวซ้าย เลี้ยวขวา และหมุนตัวได้ เหมาะสำหรับเด็กนักเรียน นักศึกษา และคนที่อยากเริ่มต้นเรียนรู้ Robotics 🎓 ที่สำคัญไม่ต้องใช้งบเยอะ! ลองมาดูกันว่าต้องใช้อุปกรณ์อะไรบ้าง และทำยังไงให้สำเร็จ
🤖 ทำไมต้องเป็นหุ่นยนต์ 2 ล้อ?
หุ่นยนต์ 2 ล้อเป็นโปรเจกต์ที่ดีที่สุดสำหรับคนเริ่มต้นเรียนรู้ Robotics เพราะมันง่าย ประหยัด และสอนหลักการพื้นฐานที่สำคัญได้ครบ! 💡 คุณจะได้เรียนรู้: การควบคุม DC Motor - เรียนรู้วิธีการขับเคลื่อนมอเตอร์ด้วย Arduino ⚙️, การใช้ Motor Driver - ทำความเข้าใจ L298N Motor Driver Module 🔧, การเขียนโค้ดพื้นฐาน - ฝึกเขียนโค้ด Arduino สำหรับควบคุมการเคลื่อนที่ 💻, การประกอบวงจร - เรียนรู้การต่อสายและประกอบชิ้นส่วน 🔌, พื้นฐาน Robotics - เข้าใจหลักการทำงานของหุ่นยนต์เคลื่อนที่ 🚗 หุ่นยนต์ 2 ล้อนี้เป็นก้าวแรกที่สมบูรณ์แบบ! หลังจากนี้คุณสามารถต่อยอดเป็น Robot Car ที่ควบคุมผ่านมือถือ หุ่นยนต์หลบหลีกสิ่งกีดขวาง หรือหุ่นยนต์ตามเส้นได้ 🌟
🛠️ อุปกรณ์ที่ต้องใช้
ดีที่สุดคือโปรเจกต์นี้ใช้อุปกรณ์ไม่เยอะ! ส่วนใหญ่หาได้ง่ายและราคาไม่แพง 💰 มาดูกันว่าต้องเตรียมอะไรบ้าง:
🔵 Arduino Uno R3
สมองของหุ่นยนต์! ใช้ Arduino Uno R3 หรือ Clone ก็ได้ ราคาประมาณ 150-250 บาท เป็นบอร์ดที่นิยมที่สุดและหาซื้อง่าย
⚙️ L298N Motor Driver
Module สำหรับควบคุมมอเตอร์ รองรับมอเตอร์ 2 ตัว ราคาประมาณ 50-80 บาท จำเป็นเพราะ Arduino ไม่สามารถจ่ายกระแสขับมอเตอร์โดยตรงได้
🔄 DC Motors (2 ตัว)
มอเตอร์ DC 3-6V พร้อมล้อ (Gearmotor) 2 ชุด เป็นตัวขับเคลื่อนล้อซ้าย-ขวา ราคาคู่ละประมาณ 60-100 บาท
🔋 แหล่งจ่ายไฟ
แบตเตอรี่ถ่าน AA 4 ก้อน (6V) หรือ 18650 Battery Pack ใช้จ่ายไฟให้มอเตอร์ อย่าใช้ USB จาก Arduino จ่ายไฟให้มอเตอร์!
🛞 ฐานหุ่นยนต์ (Chassis)
ฐานอะคริลิคหรือพลาสติกสำหรับติดตั้งอุปกรณ์ มักมาพร้อมกับ Robot Car Kit ราคาประมาณ 100-200 บาท
🔌 สาย Jumper Wire
สายไฟสำหรับต่อวงจร ใช้แบบ Female-Female และ Male-Female ประมาณ 10-15 เส้น
💡 Tips: ถ้าคุณยังไม่มีอุปกรณ์ แนะนำให้ซื้อ Arduino 2WD Robot Car Kit ที่มาครบชุด! ราคาประมาณ 300-500 บาท จะได้อุปกรณ์ครบและประกอบง่ายกว่า ประหยัดเวลาหาซื้อทีละชิ้น 🎁
🔧 วิธีการประกอบ (Step-by-Step)
มาเริ่มสร้างหุ่นยนต์กันเลย! ทำตามขั้นตอนเหล่านี้อย่างละเอียด และคุณจะได้หุ่นยนต์ที่ใช้งานได้จริง 🚀
- ประกอบฐานหุ่นยนต์: ติดมอเตอร์ 2 ตัวกับฐาน (Chassis) ใส่ล้อเข้ากับ shaft ของมอเตอร์ ติดล้อหมุนอิสระ (Caster Wheel) ด้านหลังเพื่อรองรับน้ำหนัก 🛠️
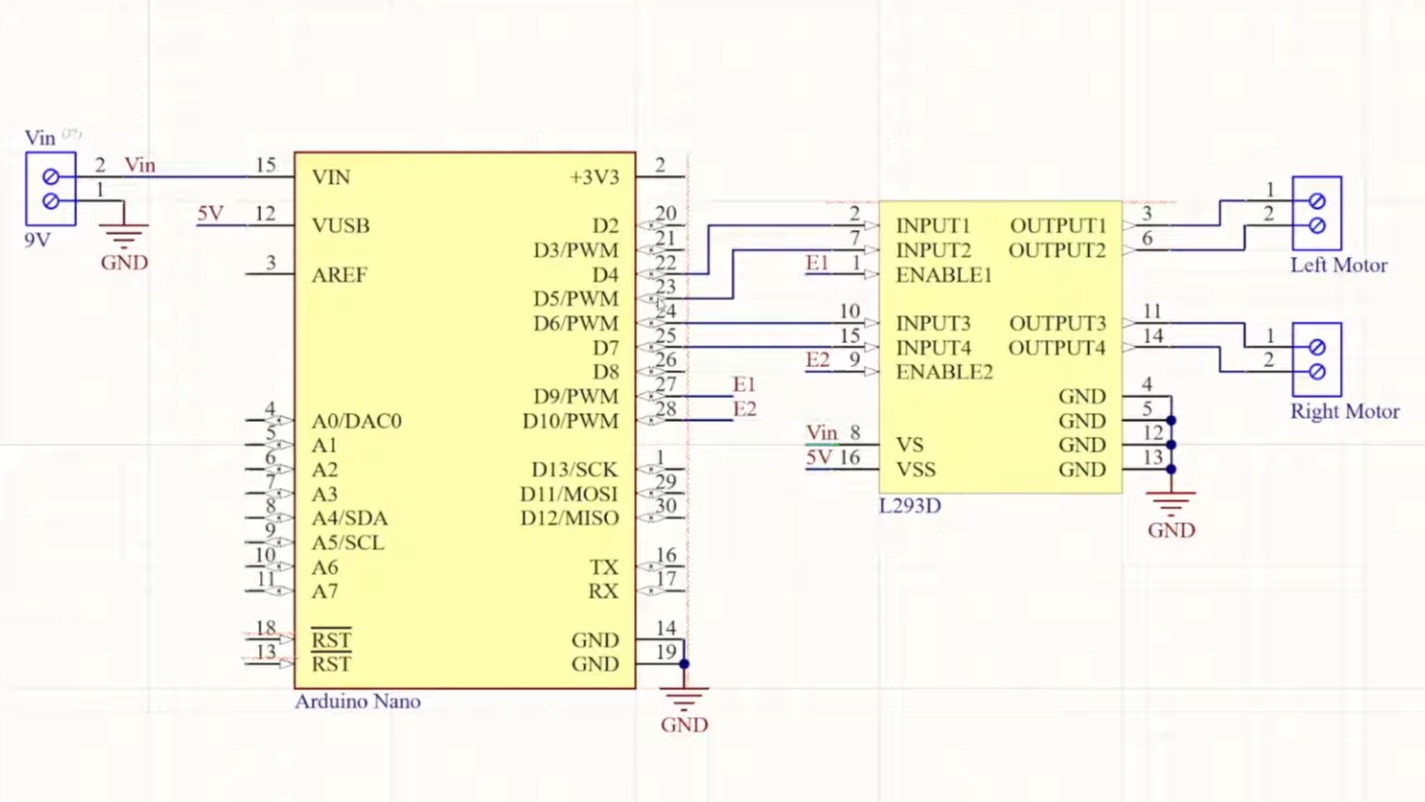
- ติดตั้ง L298N Motor Driver: ยึด L298N Module ลงบนฐาน ต่อมอเตอร์ซ้ายเข้ากับ OUT1 และ OUT2, ต่อมอเตอร์ขวาเข้ากับ OUT3 และ OUT4 🔌
- ต่อแหล่งจ่ายไฟ: ต่อแบตเตอรี่ 6V เข้ากับขั้ว +12V และ GND ของ L298N ตรวจสอบให้แน่ใจว่าขั้วบวก-ลบถูกต้อง! ⚡
- เชื่อมต่อ Arduino กับ L298N: ต่อสายจาก Arduino ไปยัง L298N ดังนี้: IN1 → Pin 8, IN2 → Pin 9, IN3 → Pin 10, IN4 → Pin 11, ENA → Pin 5 (PWM), ENB → Pin 6 (PWM), GND → GND 🔗
- ติดตั้ง Arduino Uno: ยึด Arduino Uno ลงบนฐาน ให้สาย USB สามารถเสียบได้สะดวก และไม่กีดขวางการเคลื่อนที่ 🔵
- ตรวจสอบการต่อสาย: ตรวจสอบการเชื่อมต่อทั้งหมดอีกครั้ง ตรวจสอบว่าไม่มีสายลัดวงจร และทุกอย่างต่อถูกต้อง ✅
💻 โค้ด Arduino ตัวอย่าง
หลังจากประกอบเสร็จแล้ว ก็ถึงเวลาอัปโหลดโค้ด! นี่คือโค้ดตัวอย่างที่ทำให้หุ่นยนต์เคลื่อนที่ไปข้างหน้า ถอยหลัง เลี้ยวซ้าย เลี้ยวขวา และหยุด:
// กำหนด Pin ของ Motor Driver
#define IN1 8
#define IN2 9
#define IN3 10
#define IN4 11
#define ENA 5 // PWM pin สำหรับมอเตอร์ซ้าย
#define ENB 6 // PWM pin สำหรับมอเตอร์ขวา
void setup() {
// ตั้งค่า Pin เป็น OUTPUT
pinMode(IN1, OUTPUT);
pinMode(IN2, OUTPUT);
pinMode(IN3, OUTPUT);
pinMode(IN4, OUTPUT);
pinMode(ENA, OUTPUT);
pinMode(ENB, OUTPUT);
}
void loop() {
// เดินหน้า 2 วินาที
forward();
delay(2000);
// หยุด 1 วินาที
stop();
delay(1000);
// ถอยหลัง 2 วินาที
backward();
delay(2000);
// หยุด 1 วินาที
stop();
delay(1000);
// เลี้ยวซ้าย 1 วินาที
turnLeft();
delay(1000);
// เลี้ยวขวา 1 วินาที
turnRight();
delay(1000);
}
// ฟังก์ชันเดินหน้า
void forward() {
analogWrite(ENA, 200); // ความเร็วมอเตอร์ซ้าย
analogWrite(ENB, 200); // ความเร็วมอเตอร์ขวา
digitalWrite(IN1, HIGH);
digitalWrite(IN2, LOW);
digitalWrite(IN3, HIGH);
digitalWrite(IN4, LOW);
}
// ฟังก์ชันถอยหลัง
void backward() {
analogWrite(ENA, 200);
analogWrite(ENB, 200);
digitalWrite(IN1, LOW);
digitalWrite(IN2, HIGH);
digitalWrite(IN3, LOW);
digitalWrite(IN4, HIGH);
}
// ฟังก์ชันเลี้ยวซ้าย
void turnLeft() {
analogWrite(ENA, 150);
analogWrite(ENB, 150);
digitalWrite(IN1, LOW);
digitalWrite(IN2, HIGH);
digitalWrite(IN3, HIGH);
digitalWrite(IN4, LOW);
}
// ฟังก์ชันเลี้ยวขวา
void turnRight() {
analogWrite(ENA, 150);
analogWrite(ENB, 150);
digitalWrite(IN1, HIGH);
digitalWrite(IN2, LOW);
digitalWrite(IN3, LOW);
digitalWrite(IN4, HIGH);
}
// ฟังก์ชันหยุด
void stop() {
digitalWrite(IN1, LOW);
digitalWrite(IN2, LOW);
digitalWrite(IN3, LOW);
digitalWrite(IN4, LOW);
}
📝 อธิบายโค้ด: โค้ดนี้ใช้ analogWrite() สำหรับควบคุมความเร็ว (PWM 0-255) และ digitalWrite() เพื่อกำหนดทิศทาง โดยใน loop() หุ่นยนต์จะเดินหน้า → หยุด → ถอยหลัง → หยุด → เลี้ยวซ้าย → เลี้ยวขวา แบบวนลูป 🔁
🎯 การทดสอบและปรับแต่ง
หลังจากอัปโหลดโค้ดแล้ว มาทดสอบกัน! 🧪 วางหุ่นยนต์บนพื้น: หาพื้นที่โล่งเพื่อทดสอบ อย่าทดลองบนโต๊ะเพราะอาจตกได้! 🚨 เปิดเครื่อง: เปิดสวิตช์แบตเตอรี่ หุ่นยนต์ควรเริ่มเคลื่อนที่ตามโค้ดที่เขียนไว้ ⚡ สังเกตการเคลื่อนที่: ดูว่าหุ่นยนต์เดินตรงหรือเปล่า? ถ้าเอียงไปข้างใดข้างหนึ่ง ให้ปรับค่า PWM ในโค้ด 🎚️ ปรับความเร็ว: ลองเปลี่ยนค่า analogWrite(ENA, 200) เป็น 150, 180, หรือ 255 เพื่อหาความเร็วที่เหมาะสม 🏃 เพิ่มการทำงาน: ลองปรับ delay() หรือเพิ่มฟังก์ชันใหม่ๆ เช่น หมุนรอบตัว, เดินตามรูปแบบ เป็นต้น 🎨 หากหุ่นยนต์ไม่เคลื่อนที่ ให้ตรวจสอบ: การต่อสายถูกต้องหรือไม่? 🔌, แบตเตอรี่มีไฟเพียงพอหรือไม่? 🔋, มอเตอร์ทำงานหรือเปล่า? (ลองต่อแบตเตอรี่ตรงกับมอเตอร์ดู) ⚙️, L298N Module เปิดใช้งาน Jumper EN หรือยัง? 🔧
🚀 ต่อยอดโปรเจกต์
หลังจากทำหุ่นยนต์พื้นฐานนี้สำเร็จแล้ว คุณสามารถต่อยอดได้หลายแบบ! 🌟 เพิ่ม Bluetooth Module (HC-05): ควบคุมหุ่นยนต์ผ่านมือถือด้วย App 📱, เพิ่ม Ultrasonic Sensor (HC-SR04): ทำหุ่นยนต์หลบหลีกสิ่งกีดขวางอัตโนมัติ 🚧, เพิ่ม Line Follower Sensor: สร้างหุ่นยนต์ตามเส้น (Line Following Robot) 🛤️, เพิ่ม IR Remote: ควบคุมด้วยรีโมทอินฟราเรด 📡, เพิ่ม Servo Motor: ติดแขนกลหรือเซนเซอร์ที่หมุนได้ 🦾, เพิ่ม LED และ Buzzer: ทำไฟสัญญาณและเสียง 💡🔊 โปรเจกต์นี้เป็นจุดเริ่มต้นที่สมบูรณ์แบบ! เมื่อคุณเข้าใจหลักการแล้ว คุณจะสามารถสร้างหุ่นยนต์ที่ซับซ้อนขึ้นได้ ไม่มีขีดจำกัด! 🎓💪
💡 สรุป: หุ่นยนต์ Arduino 2 ล้อเหมาะกับมือใหม่จริงหรือ?
คำตอบคือ: เหมาะมากๆ! 🎯 โปรเจกต์นี้ใช้เวลาไม่เกิน 15-30 นาทีในการประกอบ ใช้อุปกรณ์ไม่เยอะ ราคาประหยัด (ต่ำกว่า 500 บาท) และที่สำคัญ สอนหลักการพื้นฐานของ Robotics ได้ครบถ้วน! 📚 คุณจะได้เรียนรู้การควบคุมมอเตอร์ การต่อวงจร การเขียนโค้ด Arduino และการแก้ปัญหา ทักษะเหล่านี้เป็นพื้นฐานสำหรับโปรเจกต์ที่ซับซ้อนขึ้นในอนาคต 🚀 ถ้าคุณเป็นนักเรียน นักศึกษา หรือคนที่อยากเริ่มต้นเรียนรู้ Robotics โปรเจกต์นี้เป็นจุดเริ่มต้นที่สมบูรณ์แบบ! ลองทำดูแล้วคุณจะติดใจกับโลกของหุ่นยนต์และ Arduino แน่นอน 🤖💖 พร้อมเริ่มต้นสร้างหุ่นยนต์ของคุณเองหรือยัง? มาลงมือทำกันเลย! 🎨✨
🛒 พร้อมสร้างหุ่นยนต์ Arduino 2 ล้อของคุณเองหรือยัง?
ช้อป Arduino & Robot Kit ที่ Globalbyteshop 🤖


