📋 ภาพรวมโครงการ
ในบทความนี้ เราจะมาเรียนรู้วิธีการสร้างรถหุ่นยนต์ที่สามารถควบคุมได้ผ่านเว็บเบราว์เซอร์ โดยใช้ ESP32-CAM ซึ่งเป็นไมโครคอนโทรลเลอร์ที่มีกล้องในตัว ตัวรถจะส่งสัญญาณวิดีโอแบบสดๆ ขณะที่เราสามารถควบคุมการเคลื่อนที่ได้จากหน้าจออื่นผ่าน Wi-Fi

รถหุ่นยนต์ที่สามารถควบคุมผ่าน Web Server
🌐 การเชื่อมต่อ Wi-Fi
ESP32-CAM มีความสามารถในการเชื่อมต่อ Wi-Fi ซึ่งช่วยให้เราสามารถควบคุมรถหุ่นยนต์จากที่ไกลๆ ได้ เมื่อเปิดไฟและเชื่อมต่อเสร็จแล้ว ระบบจะแสดงที่อยู่ IP ของมันบนคอมพิวเตอร์หรือโทรศัพท์ของคุณ จากนั้นคุณก็สามารถเข้าถึงหน้าควบคุมได้โดยการพิมพ์ที่อยู่ IP นั้นลงในเบราว์เซอร์

แสดงที่อยู่ IP เมื่อเชื่อมต่อ Wi-Fi สำเร็จ
🎮 การควบคุมรถ
หน้าเว็บที่ใช้ควบคุมรถจะมีปุ่มสำหรับการเลี้ยวซ้าย ขับตรง ถอยหลัง และเลี้ยวขวา ระบบจะทำงานโดยการส่งคำสั่งผ่าน HTTP Request ไปยัง ESP32-CAM ซึ่งจะประมวลผลและส่งสัญญาณให้กับมอเตอร์ดำเนินการตามคำสั่ง นอกจากนี้ยังสามารถมองเห็นภาพจากกล้องแบบสดๆ เพื่อให้ทราบสภาพแวดล้อมรอบตัวรถ
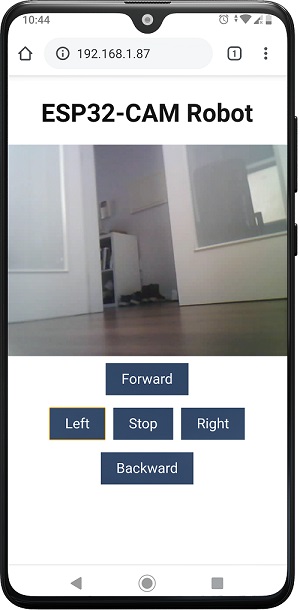
หน้าควบคุมรถสามารถใช้บนโทรศัพท์ได้
🤖 ชุดรถแชสซี
สำหรับโครงการนี้ เราใช้ชุดรถแชสซีสำเร็จรูปที่มีมอเตอร์ DC อยู่แล้ว ชุดนี้ออกแบบมาเพื่อให้ประกอบได้ง่าย และเหมาะสำหรับการทดลอง มีล้ออยู่ 4 ล้อ ที่ขับเคลื่อนจากมอเตอร์ 2 ตัว ทำให้สามารถเลี้ยวซ้าย ขวา และถอยหลังได้สะดวก

ชุดรถแชสซีสำเร็จรูปสำหรับโครงการ
⚙️ โมดูลขับเคลื่อนมอเตอร์ L298N
โมดูล L298N เป็นตัวควบคุมมอเตอร์ที่มีประสิทธิภาพสูง ใช้สำหรับควบคุมความเร็วและทิศทางการหมุนของมอเตอร์ DC สามารถควบคุมได้ถึง 2 มอเตอร์พร้อมกัน โดยใช้พินสำหรับการควบคุมทิศทาง (Forward/Backward) และพิน PWM สำหรับการควบคุมความเร็ว

โมดูล L298N สำหรับควบคุมมอเตอร์
🔋 แหล่งจ่ายไฟ
โครงการนี้ต้องการแหล่งจ่ายไฟ 5V สำหรับ ESP32-CAM และมอเตอร์ สามารถใช้ Power Bank หรือแบตเตอรี่แบบ AA ได้ Power Bank นั้นสะดวกเพราะมีขนาดเล็ก สามารถชาร์จได้ และให้พลังงานเพียงพอสำหรับการทำงานต่อเนื่องในระยะเวลาหนึ่ง

Power Bank ใช้สำหรับจ่ายไฟให้ระบบ
📦 รายการอุปกรณ์ที่ต้องใช้
-
ESP32-CAM AI-Thinker - ไมโครคอนโทรลเลอร์พร้อมกล้องและ Wi-Fi
-
L298N Motor Driver - โมดูลขับเคลื่อนมอเตอร์
-
Robot Car Chassis Kit - ชุดแชสซีรถพร้อมมอเตอร์และล้อ
-
Power Bank หรือแหล่งจ่ายไฟ 5V - สำหรับจ่ายไฟให้ระบบ
-
Prototyping Circuit Board (Breadboard) - สำหรับต่อวงจร (ตัวเลือก)
-
สายต่อสัญญาณ (Jumper Wires) - สำหรับเชื่อมต่ออุปกรณ์
-
หนีบจระหน่ายพลังงาน (USB Cable) - สำหรับอัปโหลดโค้ด
💻 โค้ด
โค้ดที่ใช้ในโครงการนี้เขียนด้วย Arduino IDE ซึ่งจะสร้าง Web Server บน ESP32-CAM ที่รับคำสั่งจากเบราว์เซอร์ และส่งสัญญาณควบคุมให้กับมอเตอร์ผ่านโมดูล L298N นอกจากนี้ยังมีการตั้งค่า Wi-Fi และการส่งสตรีมวิดีโอจากกล้อง
⚡ วิธีทำงานของโค้ด
เมื่อ ESP32-CAM เริ่มทำงาน มันจะเชื่อมต่อกับ Wi-Fi ตามที่ตั้งค่าไว้ จากนั้นจะเปิด Web Server บนที่อยู่ IP ของตัวเอง เมื่อใครเข้าถึง URL นั้น จะแสดงหน้าเว็บที่มีปุ่มควบคุมและสตรีมวิดีโอจากกล้อง เมื่อคลิกปุ่ม มันจะส่ง HTTP Request กลับมายัง ESP32-CAM พร้อมกับคำสั่ง ซึ่ง ESP32-CAM จะประมวลผลและควบคุมพินที่เชื่อมต่อกับโมดูล L298N เพื่อให้มอเตอร์หมุน
🔗 การจัดการคำขอ
โค้ดจะตรวจสอบ URL ที่ส่งมาจากเบราว์เซอร์ เช่น "/forward" "/backward" "/left" และ "/right" เมื่อได้รับคำขอ มันจะเปลี่ยนสถานะของพิน GPIO ที่เชื่อมต่อกับ L298N ตัวอย่างเช่น เมื่อได้รับ "/forward" มันจะตั้ง IN1 เป็น HIGH และ IN2 เป็น LOW เพื่อให้มอเตอร์หมุนไปข้างหน้า

แสดงคำสั่งที่ระบบได้รับบน Serial Monitor
🧪 ทดสอบโค้ด
หลังจากอัปโหลดโค้ดสำเร็จ ให้เปิด Serial Monitor ใน Arduino IDE เพื่อดูว่า ESP32-CAM ได้เชื่อมต่อ Wi-Fi หรือไม่ หากเชื่อมต่อสำเร็จ มันจะแสดงที่อยู่ IP บน Serial Monitor จากนั้นพิมพ์ที่อยู่ IP นั้นลงในเบราว์เซอร์ เพื่อเข้าถึงหน้าควบคุม ลองคลิกปุ่มต่างๆ เพื่อตรวจสอบว่ารถเคลื่อนที่ตามคำสั่งหรือไม่
🔌 การต่อวงจร
การต่อวงจรเป็นส่วนสำคัญของโครงการนี้ ต้องต่อ ESP32-CAM เข้ากับ L298N โดยการต่อพิน GPIO ของ ESP32-CAM กับพิน IN1, IN2, IN3, IN4 ของโมดูล L298N นอกจากนี้ยังต้องต่อ OUT1, OUT2 ของ L298N เข้ากับมอเตอร์ตัวแรก และ OUT3, OUT4 เข้ากับมอเตอร์ตัวที่สอง จำเป็นต้องต่อพื้นดิน (GND) ของทั้งสองอุปกรณ์ด้วย

แผนผังการต่อวงจรของระบบทั้งหมด

การต่อวงจรบน Breadboard
📺 การสาธิต
เมื่อทุกอย่างต่อเชื่อมสำเร็จ ให้เปิดไฟและทดลองควบคุมรถผ่านหน้าเว็บ ระบบจะแสดงสตรีมวิดีโอแบบสดๆ จากกล้องพร้อมกับปุ่มควบคุมการเคลื่อนที่ การทดลองนี้จะช่วยให้คุณเข้าใจวิธีการทำงานของระบบและสามารถปรับแต่งได้ตามต้องการ

หน้าเว็บแสดงการควบคุมและสตรีมวิดีโอ

รถหุ่นยนต์ที่ประกอบเสร็จสิ้น พร้อมใช้งาน

การทดลองควบคุมรถจากสมาร์ทโฟน
✅ สรุป
โครงการนี้เป็นตัวอย่างที่ดีของการนำ IoT เข้ามาใช้ในงานจริง ผสมผสานความสามารถของไมโครคอนโทรลเลอร์ การเชื่อมต่อ Wi-Fi และการควบคุมฮาร์ดแวร์ นอกจากนี้ยังสามารถขยายโครงการนี้ให้มีความสามารถมากขึ้น เช่น การเพิ่มเซนเซอร์ เพื่อตรวจจับสิ่งกีดขวาง หรือการบันทึกวิดีโอ หรือแม้กระทั่งการควบคุมด้วย Voice Command เป็นต้น
📚 อ้างอิง
บทความนี้อ้างอิงจาก:
จัดทำโดย: Globalbyteshop Blog
แปล อธิบายเพิ่มเติม และปรับปรุงเนื้อหาให้เข้าใจง่ายขึ้นสำหรับผู้อ่านภาษาไทย








