AI Mobility Companion: ผู้ช่วยนำทางอัจฉริยะสำหรับผู้พิการทางสายตาด้วย AI ออฟไลน์
ลองจินตนาการดูว่า ถ้าผู้พิการทางสายตาสามารถ "มองเห็น" สิ่งแวดล้อมรอบตัวได้โดยไม่ต้องพึ่งพาอินเทอร์เน็ต จะช่วยเพิ่มความปลอดภัยในการใช้ชีวิตประจำวันได้มากขนาดไหน?
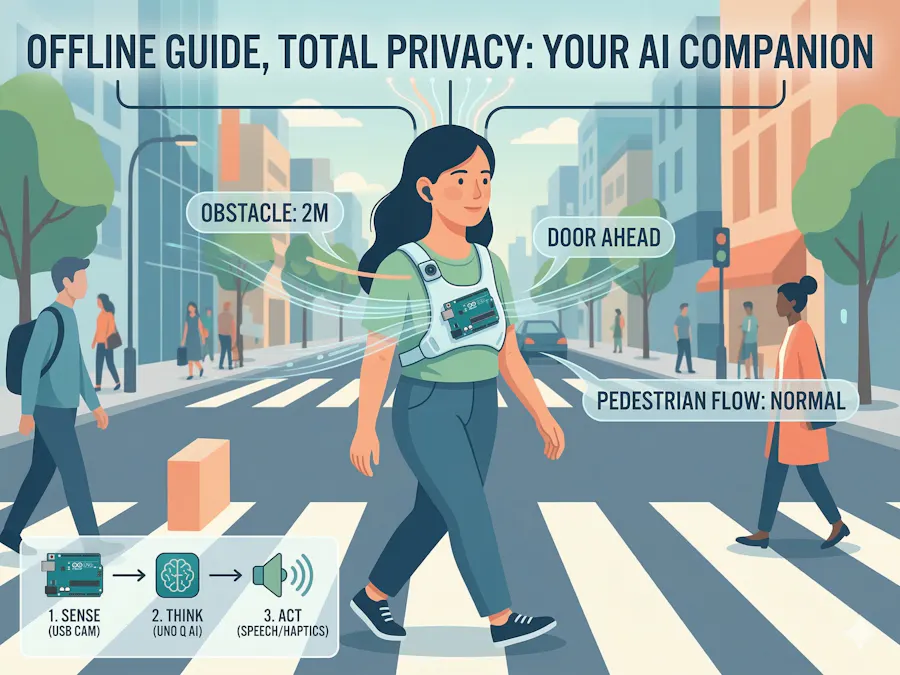
โปรเจกต์ The AI Mobility Companion คืออุปกรณ์สวมใส่ (Wearable) สุดล้ำที่ออกแบบมาเพื่อผู้พิการทางสายตาโดยเฉพาะ แตกต่างจากอุปกรณ์นำทางทั่วไปตรงที่มันใช้พลังของ Edge AI บนบอร์ด Arduino UNO Q ในการตรวจจับสิ่งกีดขวางและประมวลผลแบบ "ออฟไลน์" ทั้งหมด! พร้อมแจ้งเตือนผู้ใช้งานผ่านระบบสั่นและเสียงบรรยายแบบเรียลไทม์
อุปกรณ์ที่ใช้ในโปรเจกต์ (Hardware & Software)
-
สมองกลหลัก: Arduino UNO Q
-
ระบบการมองเห็น: M5Stack ESP32 Camera Module และเซ็นเซอร์วัดระยะทาง (HC-SR04, VL53L1X ToF Sensor)
-
ระบบแจ้งเตือน: SparkFun Haptic Motor Driver (DRV2605L), Grove Haptic Motor และ Grove Speaker
-
ระบบพลังงาน: M5Stack Battery Module สำหรับ ESP32 Core
-
ซอฟต์แวร์: Edge Impulse Studio และ OpenCV
ทำไมถึงต้องสร้างโปรเจกต์นี้? (แก้ปัญหา Connectivity Gap)
อุปกรณ์ AI ช่วยนำทางในตลาดส่วนใหญ่มักมีข้อจำกัดเรื่อง "Connectivity Gap" นั่นคือมันต้องการอินเทอร์เน็ตตลอดเวลาเพื่อส่งภาพวิดีโอไปประมวลผลบนคลาวด์ (Cloud) ซึ่งก่อให้เกิดปัญหาตามมา 3 อย่าง ผู้สร้างจึงดึง AI มาประมวลผลบนตัวอุปกรณ์โดยตรง (Local Processing) เพื่อแก้ปัญหาเหล่านี้:
- ความเร็ว (Speed): ไม่มีอาการหน่วงหรือแล็กเมื่อตรวจเจอสิ่งกีดขวางกะทันหัน ซึ่งเป็นเรื่องคอขาดบาดตาย
- ความเป็นส่วนตัว (Privacy): ข้อมูลภาพและวิดีโอจะไม่ถูกส่งออกจากตัวอุปกรณ์เลย ปลอดภัย 100%
- ความเสถียร (Reliability): ใช้งานได้ทุกที่ แม้จะอยู่ในสถานีรถไฟใต้ดิน พื้นที่ห่างไกล หรือในจุดที่ไม่มี Wi-Fi
หลักการทำงานแบบสมมาตร (Symmetry Architecture)
บอร์ด Arduino UNO Q มีสถาปัตยกรรมที่น่าสนใจมาก คือการทำงานร่วมกันระหว่างฝั่ง Linux (เปรียบเสมือน "สมอง") และฝั่งไมโครคอนโทรลเลอร์ STM32 (เปรียบเสมือน "ร่างกาย") โดยระบบจะแบ่งหน้าที่เป็น 3 ส่วนหลัก ดังนี้:
-
1. การรับรู้ (The Vision - Sense): กล้อง USB ที่ติดอยู่บริเวณหน้าอกของผู้ใช้ จะสตรีมภาพไปให้ชิปประมวลผล Qualcomm Dragonwing (ฝั่ง Linux)
-
2. การวิเคราะห์ (The AI - Think): โมเดล Object Detection จาก Edge Impulse (รันในสภาพแวดล้อม App Lab) จะคอยประมวลผลภาพ แยกแยะสิ่งของ (เช่น ประตู เก้าอี้ บันได) พร้อมคำนวณระยะห่างและตำแหน่งของสิ่งเหล่านั้นทันที
-
3. การตอบสนอง (The Feedback - Act): ฝั่ง Linux จะส่งข้อมูลผ่านสะพานเชื่อม (Logic Bridge) ไปให้ฝั่งไมโครคอนโทรลเลอร์ STM32 ทำหน้าที่สั่ง มอเตอร์สั่น (Haptics) ให้สั่นเตือนที่ด้านซ้ายหรือขวาตามตำแหน่งของสิ่งกีดขวาง ในขณะเดียวกัน ฝั่ง Linux ก็จะแปลงข้อความเป็นเสียง (Text-to-Speech ด้วย Python) แล้วส่งคำบรรยายเสียงกระซิบ (Audio whispers) แจ้งสภาพแวดล้อมเข้าหูฟังบลูทูธของผู้ใช้
สรุป: โปรเจกต์ AI Mobility Companion เป็นเครื่องพิสูจน์ชั้นดีว่า เราสามารถย่อระบบ Computer Vision ที่ซับซ้อน ออกจากระบบคลาวด์มาใส่ไว้ในอุปกรณ์สวมใส่ (Wearable) ได้สำเร็จ ช่วยคืนความอิสระและมอบความปลอดภัยให้กับผู้พิการทางสายตาได้อย่างแท้จริงครับ!
สนใจบอร์ดพัฒนา AI และอุปกรณ์เซ็นเซอร์สำหรับสร้างนวัตกรรมดีๆ ไหม?
คำเตือน: เนื้อหานี้เป็นการสรุปและเรียบเรียงจากบทความต้นฉบับภาษาอังกฤษ ข้อมูลฉบับภาษาไทยอาจมีความคลาดเคลื่อนบางประการจากการตีความหรือย่อเนื้อหา
แท็ก
Arduino
Arduino AI
Arduino Nano
Arduino Nano R3
Arduino UNO Q
Arduino Ventuno Q








