
Raspberry Pi พาคุณดำน้ำ: สร้าง ROV ใต้น้ำแบบ DIY
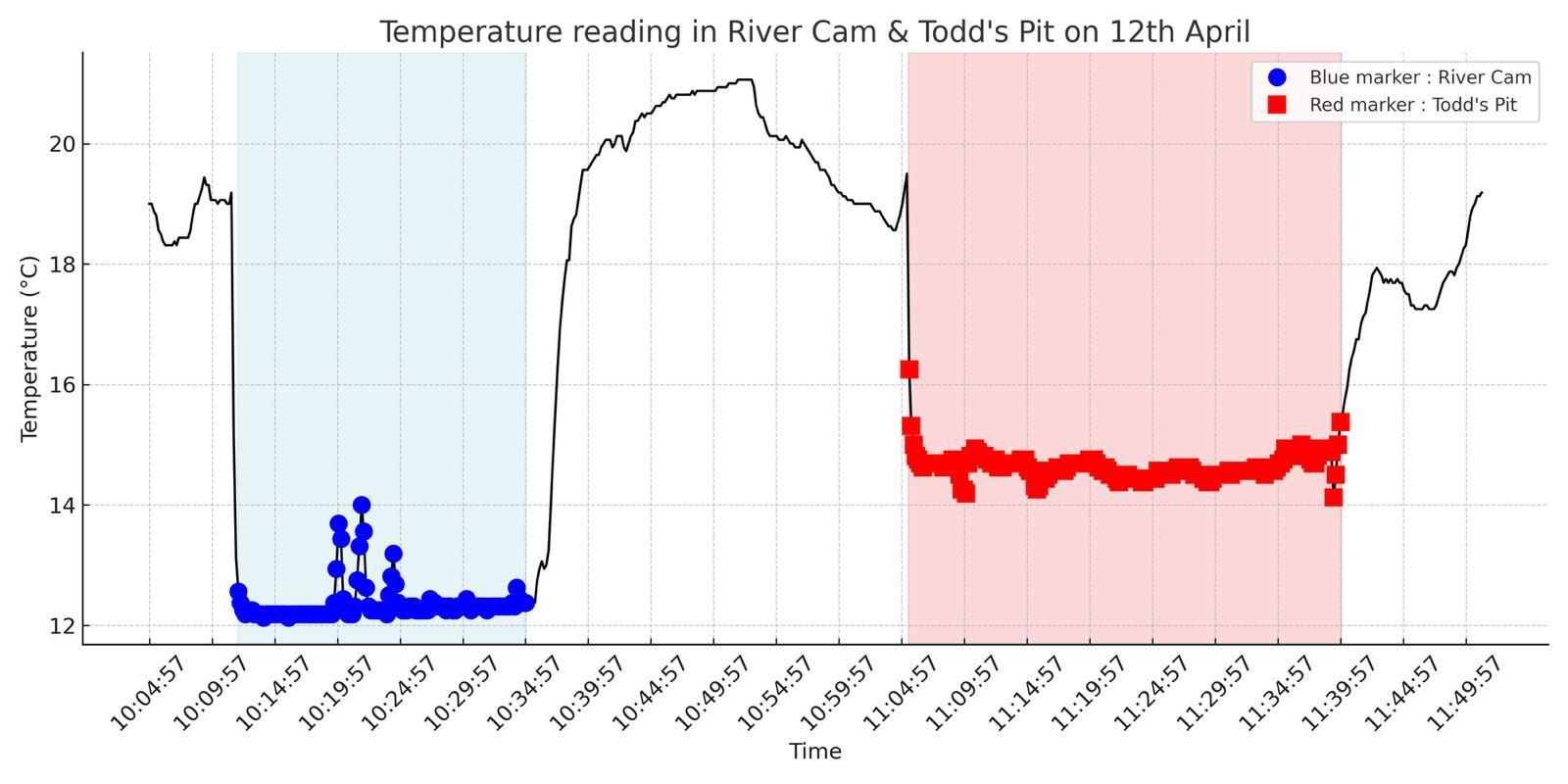
การทดสอบ Sensea ในแหล่งน้ำจริง:
เคยสงสัย ว่าใต้น้ำแหล่งเก็บน้ำหรือสระของเรามีอะไรอยู่บ้างไหม? วันนี้เราจะเรียนรู้วิธี สร้างระบบ ROV (Remotely Operated Vehicle) ที่ควบคุมได้จากบ้าน พร้อมกล้องมองเห็นใต้น้ำและเซนเซอร์วัดอุณหภูมิ ระบบนี้ไม่ยากไม่ค่อยแพง และเหมาะสำหรับคนที่อยากเรียนรู้ IoT ครั้งแรก
Sensea เป็นโปรเจกต์สร้างสรรค์ที่ใช้Raspberry Piเป็นหัวใจ พร้อมระบบขับเคลื่อน thruster ไฟฟ้า กล้องเว็บแคม และเซนเซอร์อุณหภูมิ คุณสามารถควบคุมมันแบบเรียลไทม์ผ่านคอมพิวเตอร์หรือมือถือ ดูภาพใต้น้ำสดๆ จากห้องนอนตัวเอง
Sensea คืออะไร
Sensea คือระบบ ROV (Remotely Operated Vehicle) ตัวแรกของตัวเองที่ดำน้ำได้อย่างอิสระ ไม่ต้องผูกสาย ไม่ต้องท่อลม มันมี:
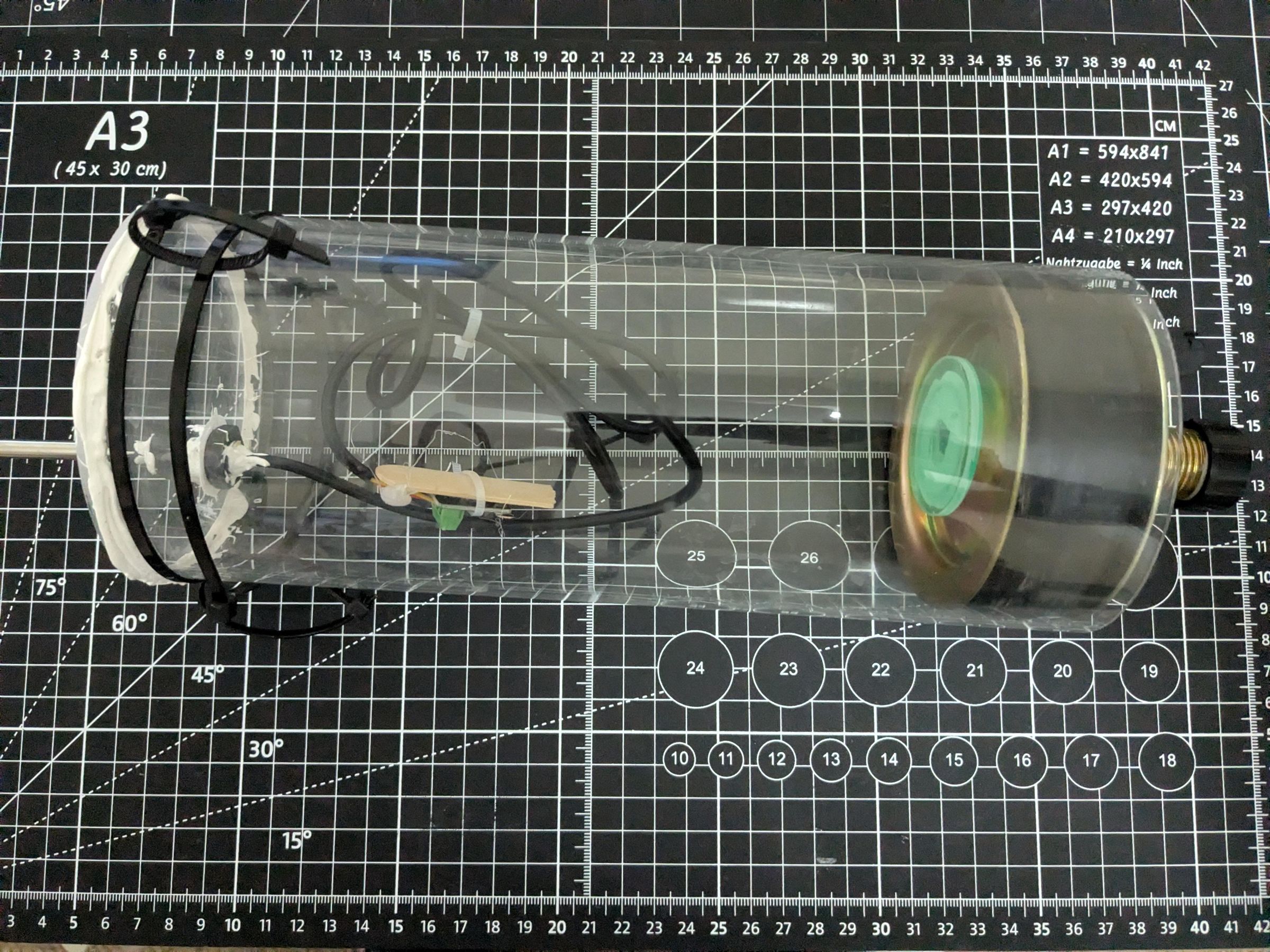
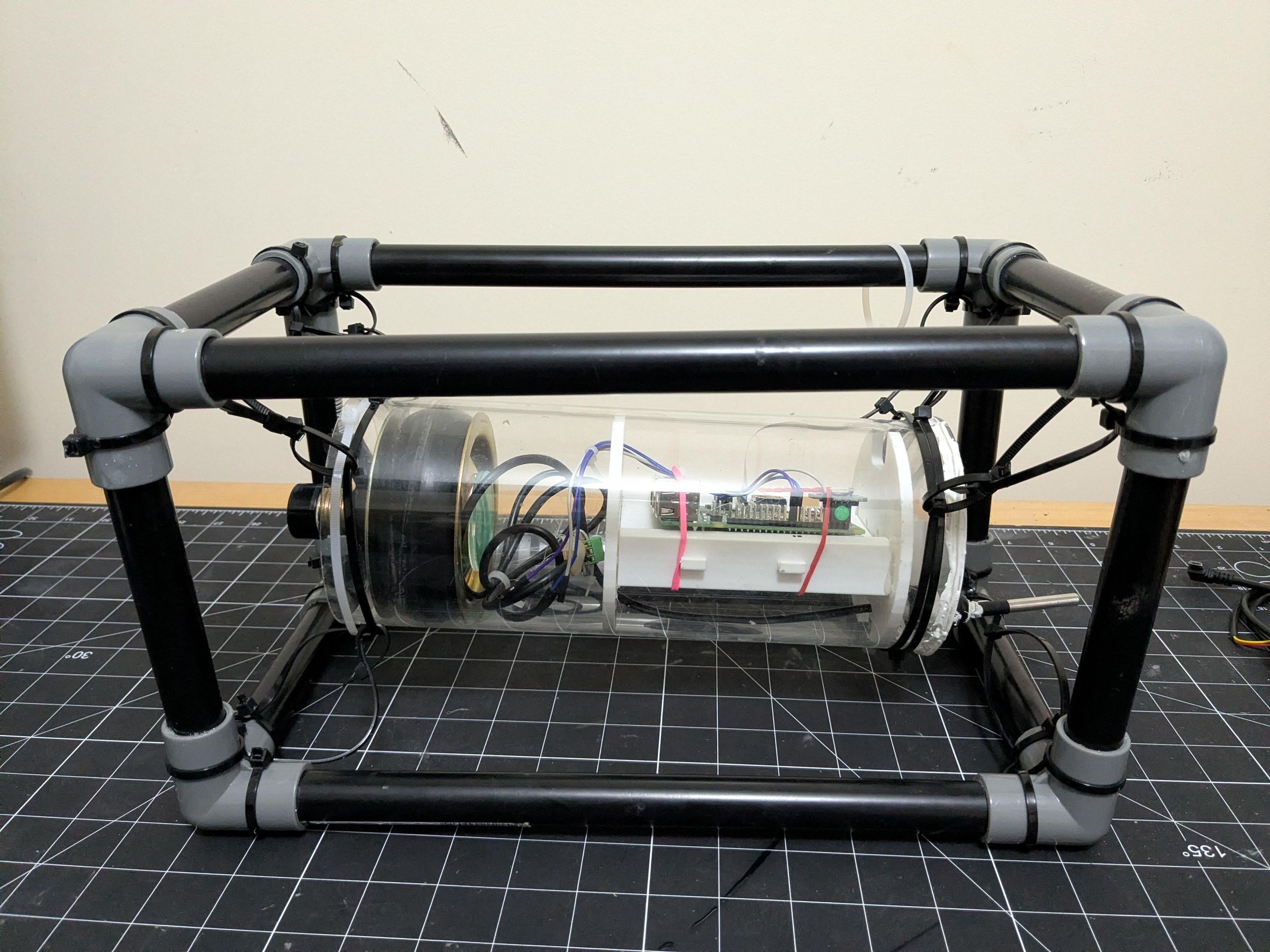
- ตัวเรือน: บ้านของ Raspberry Pi ทำจากท่อ PVC กันน้ำ (Waterproof tube)
- กล้องเว็บแคม: เห็นเรียลไทม์ใต้น้ำ ปล่อยสัญญาณผ่าน WiFi ขึ้นมาที่คอมพิวเตอร์
- มอเตอร์ Thruster (ใบพัด): 4 ตัว ใช้ควบคุมการเคลื่อนที่ในทั้ง 6 ทิศทาง (หมุนได้ทั้ง 360 องศา)
- เซนเซอร์อุณหภูมิ: วัดอุณหภูมิน้ำในแต่ละมิติของการดำน้ำ
- ไฟ LED: ส่องสว่างใต้น้ำเพื่อดูรายละเอียดภาพ
ทำไมต้องสร้าง ROV แบบ DIY
- ราคาเข้าถึงได้: ROV ที่ขายในตลาดราคาแพงมาก (หลายหมื่น) เทพระบบนี้ประหยัดกว่ามาก
- เรียนรู้ได้มากมาย: ประกอบด้วยการเชื่อมต่อ sensor, network programming, robotics ทั้งหมดในโปรเจกต์เดียว
- ปรับแต่งได้: ตัวเองออกแบบได้ พอใจปีกให้กว้าง หรือเพิ่มมอเตอร์ได้ตามต้องการ
- สำรวจธรรมชาติ: ใช้ดูแหล่งน้ำ ตรวจสอบคุณภาพน้ำ หรือท่องเที่ยวแบบ \"ดำน้ำไม่เปียก\"
อุปกรณ์ที่ต้องเตรียม
อุปกรณ์หลัก 10 รายการ:
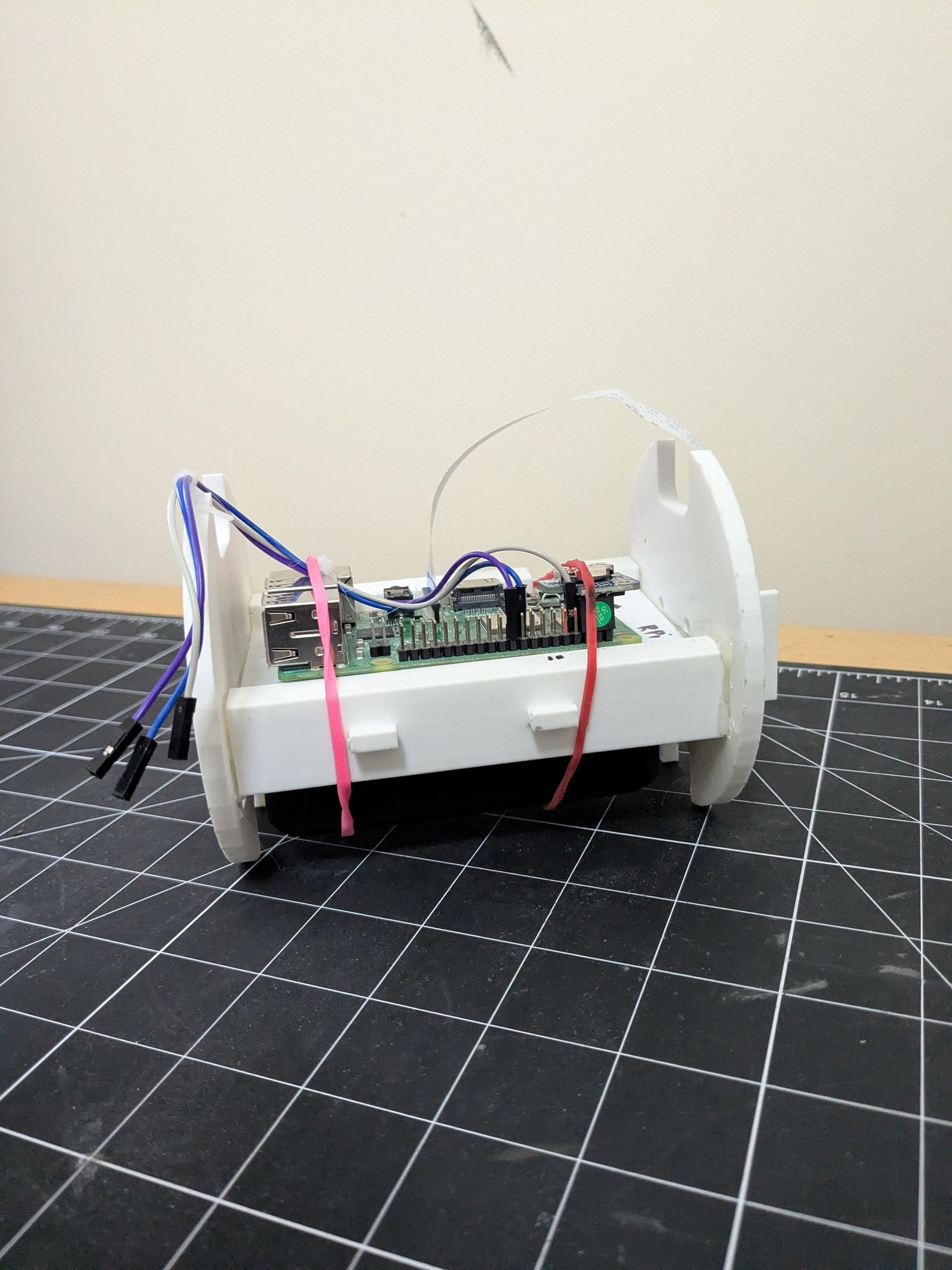
คอมพิวเตอร์ขนาดเล็กสำหรับควบคุม ROV ทั้งระบบ
กล้องสำหรับมองใต้น้ำ ต้องมี เลนส์กันน้ำ
ใช้ควบคุมการขับเคลื่อนของ Thruster
วัดอุณหภูมิน้ำ ราคาประหยัด
ใช้ร่วมกับ Temperature Sensor
สำหรับสว่างใต้น้ำ
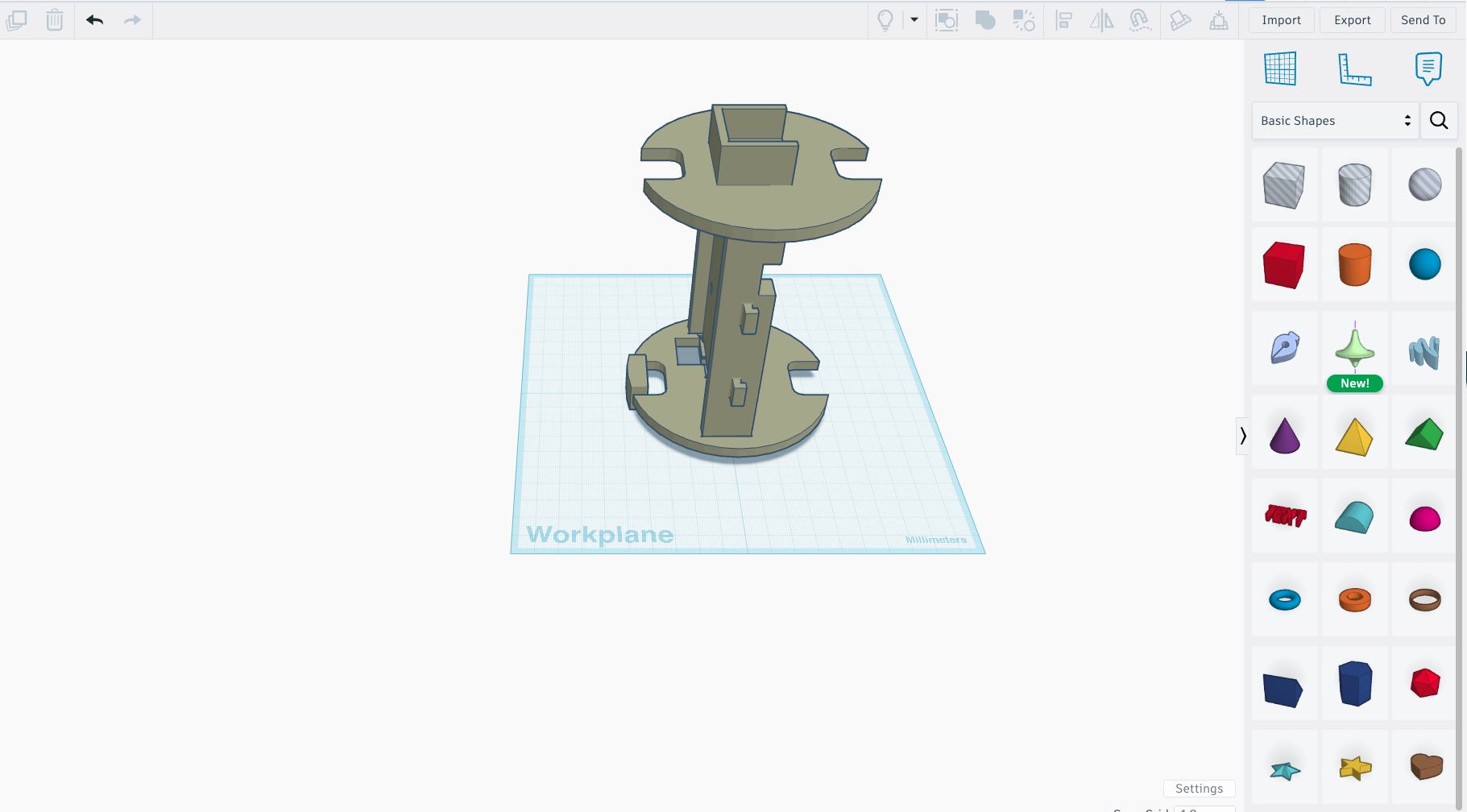
โครงสร้างป้องกัน Raspberry Pi จากน้ำ
ให้พลังงานแบบไร้สาย โดยสามารถขึ้นมาเมื่อเสร็จ
ควบคุมการหมุน (optional ถ้าต้องการหมุนกล้อง)
ต่อสายวงจร
หลักการทำงาน
ขั้นตอนการทำงาน 5 ตอน:
- เปิดตัว Sensea: Raspberry Pi ตื่นจากสลัมเบอร์ เชื่อมต่อ WiFi
- กล้องจับภาพ: Pi Camera ส่งภาพสดใต้น้ำไปยัง Server/Computer
- ประมวลข้อมูล: Python Script อ่านค่าจาก Sensor + ประมวลสัญญาณควบคุม
- ขับเคลื่อน Thruster: Motor ทั้ง 4 ตัวหมุน คุณตัดสินใจขึ้น ลง ไปข้างหน้า ถอยหลัง
- เก็บข้อมูล: ข้อมูลอุณหภูมิและระยะทางเก็บไว้ในฐานข้อมูล
ขั้นตอนการสร้าง 12 ส่วน
ตามโปรเจกต์ต้นฉบับมี 12 ขั้นตอน:





ตัวอย่างขั้นตอนสำคัญ:
- ขั้นที่ 1-3: ออกแบบโครงสร้าง เตรียมวัสดุ ประกอบตัวเรือน PVC
- ขั้นที่ 4-5: ต่อ Motor + Motor Shield + วงจรควบคุม
- ขั้นที่ 6-7: ติดตั้งกล้อง + เซนเซอร์ + เทป Waterproof Tape เพื่อกันน้ำ
- ขั้นที่ 8-10: เขียน Python Script + ทดสอบการขับเคลื่อน
- ขั้นที่ 11-12: ไปเทสด้วยน้ำจริง + บันทึกผล
ความสามารถของ Sensea
- กล้องสดใต้น้ำ: ดูภาพ 30fps ขึ้นมาคอมพิวเตอร์หรือมือถือ
- ควบคุมจากไกล: ใช้ Keyboard หรือ Joystick ควบคุมการเคลื่อนที่ใต้น้ำ
- วัดอุณหภูมิ: เซนเซอร์ DS18B20 บันทึกอุณหภูมิตามเวลา
- ส่องสว่าง: LED ขับเคลื่อนด้วยมือเพื่อเห็นชัดลึกเข้าไป
- บัฟสายไฟ 5 ชั่วโมง: แบตเตอรี่ Li-Po ให้พลังงานนานพอสำหรับการสำรวจแบบสั้น
ดูภาพจากกล้อง Sensea ใต้น้ำ:
ต่อยอดจากนี่
- MQTT + Home Assistant: ต่อรวม ROV เข้ากับระบบบ้านอัจฉริยะ
- Machine Learning: ใช้ AI จำแนกสิ่งมีชีวิตใต้น้ำ
- ระยะไกลขึ้น: ใช้ 4G Modem ควบคุม ROV จากที่ไหนก็ได้
- ยืดเพิ่ม Sensor: เพิ่มเซนเซอร์วัด pH, ความเค็ม, ความขุ่น
- หลาย ROV: ควบคุม 2-3 ตัว พร้อมกันด้วย Swarm Robotics
พร้อมเริ่มสร้าง Sensea ของตัวเอง?
คำเตือน
เนื้อหานี้เป็นการสรุปและเรียบเรียงจากบทความต้นฉบับภาษาอังกฤษบน Instructables ข้อมูลฉบับภาษาไทยอาจมีความคลาดเคลื่อนบางประการจากการตีความหรือย่อเนื้อหา กรุณาตรวจสอบข้อมูลจากแหล่งต้นฉบับหรือ Datasheet อุปกรณ์ก่อนนำไปใช้งานจริง


