โฉมหน้าตู้ปลาหุ่นยนต์ดำน้ำไซส์จิ๋ว! ไม่ต้องให้อาหาร ไม่ต้องล้างตู้ปลาบ่อยๆ
Wassup ชาว Maker สายขี้เกียจ! 🌊 ใครๆ ก็ชอบดูตู้ปลาสวยๆ เนอะ มันดูเพลินและฮีลใจดี แต่พอถึงเวลาต้องมานั่งเปลี่ยนน้ำ ให้อาหาร ล้างตะไคร่... หลายคนก็ขอบาย! ถ้าอย่างนั้นเรามาทำ "ตู้ปลาหุ่นยนต์ดำน้ำ (Micro Submarines)" แบบไม่ต้องดูแลรักษาให้วุ่นวายกันดีกว่า!
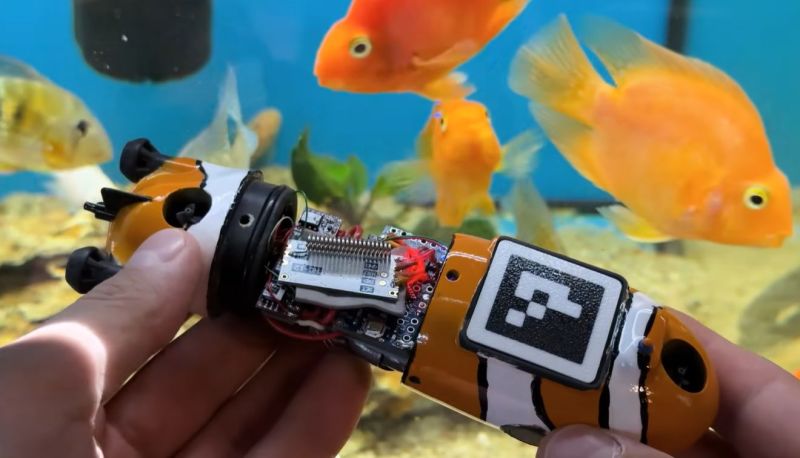
นี่คือโปรเจกต์สุดบรรเจิดจากช่อง [CPSDrone] ที่จับเอาเรือดำน้ำไซส์จิ๋วมาใส่ในตู้ปลาแทนปลาจริงๆ ซะเลย! แถมความล้ำคือ หุ่นยนต์พวกนี้สามารถว่ายกลับไปที่แท่นชาร์จใต้น้ำได้เองเหมือนหุ่นยนต์ดูดฝุ่น (Roomba) เลยล่ะครับ!
ความท้าทาย: คุยกันใต้น้ำยังไงไม่ให้บอด? 📻
ปัญหาใหญ่ของการทำหุ่นยนต์ใต้น้ำคือ สัญญาณ Wi-Fi หรือ Bluetooth (2.4GHz) ทะลุผิวน้ำไม่ได้ครับ! ผู้พัฒนาเลยต้องหนีไปใช้คลื่นความถี่ต่ำอย่าง โมดูลวิทยุ 433 MHz แทน ซึ่งจากการทดสอบแล้ว มันสามารถส่งสัญญาณทะลุน้ำในตู้ปลาขนาดเล็กได้สบายๆ!
บอดี้ต้องเป๊ะ น้ำห้ามเข้า! 💧
แน่นอนว่าเอาอุปกรณ์อิเล็กทรอนิกส์ลงน้ำ เคสต้องกันน้ำ 100% งานนี้เค้าเลยใช้เทคโนโลยี Resin 3D Printing ในการสร้างโครงเรือดำน้ำขึ้นมา เพราะเรซินมีความละเอียดสูง น้ำไม่ซึมตามเลเยอร์เหมือนพลาสติก FDM ผนึกกำลังกับ ซีลยาง O-ring และยาแนวทับด้วย UV Resin อีกชั้นเพื่อให้ชัวร์ว่าน้ำไม่เข้าแน่นอน
💡 ป้ายยาไอเทมเด็ด: โปรเจกต์ที่ต้องลงน้ำแบบนี้ การใช้เครื่องปริ้นท์ 3D ระบบเรซิน (Resin 3D Printer) คือคำตอบที่ถูกต้องที่สุดครับ! เนื้องานจะเนียนกริ๊บและกันน้ำได้ดีเยี่ยม
หากเพื่อนๆ ไม่มีเครื่องปริ้นท์เรซิน หรือกำลังมองหา บอร์ดไมโครคอนโทรลเลอร์ขนาดเล็ก และโมดูลวิทยุ RF 433MHz แวะมาจัดที่ Globalbyte Shop ได้เลยครับ! เรามีบริการ รับปริ้นท์ชิ้นงาน 3D ทั้งระบบ FDM และ Resin ทัก LINE OA มาส่งไฟล์ให้ประเมินราคาฟรีได้เลย!
ทำให้หุ่นยนต์ว่ายน้ำเหมือนปลาจริงด้วย Boids Algorithm 🐠
เพื่อให้หุ่นยนต์ดูมีชีวิตชีวา ไม่ใช่วิ่งชนตู้ไปวันๆ เราสามารถนำ Boids Algorithm (อัลกอริทึมจำลองพฤติกรรมฝูงสัตว์) มาประยุกต์ใช้ได้ครับ อัลกอริทึมนี้มีกฎง่ายๆ แค่ 3 ข้อ:
-
Separation: รักษาระยะห่าง ไม่ว่ายไปชนเพื่อน
-
Alignment: หันหน้าไปทิศทางเดียวกับเพื่อนในฝูง
-
Cohesion: ว่ายเกาะกลุ่มกันไว้ไม่ให้แตกฝูง
ถึงแม้ว่าในโปรเจกต์ของ [CPSDrone] จะยังไม่ได้ใส่ระบบนี้ลงไป (เค้าใช้ระบบคุมจากศูนย์กลางแทน) แต่ถ้าใครอยากพัฒนาต่อ การใส่เซนเซอร์ให้หุ่นยนต์แต่ละตัวคุยกันเอง แล้วรันอัลกอริทึม Boids จะทำให้ตู้ปลาของคุณล้ำสุดๆ ไปเลยครับ!
⚠️ คำเตือนสำหรับสายหาทำ
การออกแบบจุดศูนย์ถ่วง (Center of Gravity) และการลอยตัว (Buoyancy) ของหุ่นยนต์ใต้น้ำเป็นเรื่องปราบเซียนมาก! ต้องบาลานซ์น้ำหนักให้ดี ไม่งั้นหุ่นจะจมดิ่งหรือหงายท้อง แนะนำให้ดู วิดีโอคลิปต้นฉบับ เพื่อศึกษากลไกการทำงานของแท่นชาร์จใต้น้ำให้ละเอียดครับ!
🔗 ข้อมูลอ้างอิงและทฤษฎีอัลกอริทึม (ตามไปเสพกันต่อ!):
⚡ อุปกรณ์พร้อม ไอเดียพร้อม แล้วคุณล่ะพร้อมสร้างตู้ปลาอัจฉริยะหรือยัง? ⚡
*Disclaimer (ข้อจำกัดความรับผิดชอบ): เนื้อหาบทความนี้ถูกเรียบเรียงและสรุปมาจากโปรเจกต์ต่างประเทศ ข้อมูลการทำเคสกันน้ำ (Waterproofing) และการเขียนโปรแกรมควบคุมแบบศูนย์กลางมีความซับซ้อน ผู้ที่สนใจประกอบตามควรเข้าไปศึกษาเทคนิคต่างๆ จาก
วิดีโอของต้นฉบับ อย่างละเอียด เพื่อป้องกันอันตรายจากไฟฟ้าช็อตใต้น้ำครับ!








