โฉมหน้าแขนกล 3 แกน (Micro-manipulator) ที่ให้ความละเอียดการขยับเล็กกว่าเส้นผมมนุษย์เป็นร้อยเท่า!
Wassup ชาว Maker สายคราฟต์! 🛠️ เวลาเราพูดถึงความแม่นยำสูงๆ ระดับ "ซับไมครอน (Sub-micron)" หรือระดับนาโนเมตร อุปกรณ์ตัวแรกที่ผุดขึ้นมาในหัวคงไม่ใช่ Stepper Motor ธรรมดาๆ ใช่ไหมครับ? เพราะมอเตอร์พวกนี้ปกติมันจะขยับเป็น "กึกๆ" (Step) ตามองศาของมัน
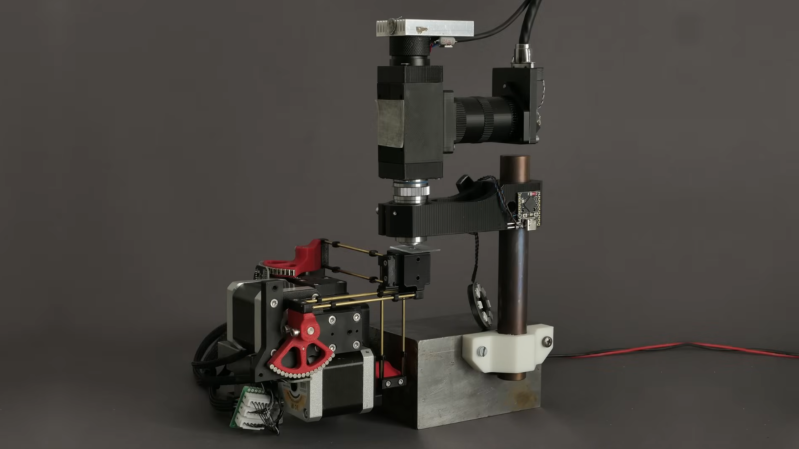
แต่วันนี้มีคนทุบข้อจำกัดนั้นทิ้งแล้วครับ! เมื่อแชนแนล [Diffraction Limited] โชว์ของทำเครื่อง Micro-manipulator (เครื่องมือขยับชิ้นงานขนาดจิ๋ว) ที่ใช้ Stepper Motor บ้านๆ มาจับคู่กับระบบเซนเซอร์ตอบกลับ (Closed-loop feedback) จนสามารถสั่งขยับได้ละเอียดถึง 50 นาโนเมตร! (เล็กจนแทบจะมองด้วยตาเปล่าไม่เห็นแล้ววัยรุ่น!)
เคล็ดลับความละเอียดระดับปีศาจ 😈
การจะทำแบบนี้ได้ ไม่ใช่แค่ต่อมอเตอร์เข้าบอร์ดแล้วจบนะ เค้าต้องใช้เทคนิคทางวิศวกรรมผสมผสานกันแบบโคตรตึง:
-
เกียร์แม่เหล็กไร้รอยต่อ: ปกติเซนเซอร์แม่เหล็ก (Magnetic rotary encoder) จะอ่านค่าได้ 100,000 สเตปต่อรอบ แต่นั่นยังไม่พอ! เค้าเลยเรียงแม่เหล็กสลับขั้วเป็นวงกลมติดไว้กับแกนมอเตอร์ ทำให้เกิดเป็น "Magnetic Gear" ที่ขยายความละเอียดขึ้นไปอีกขั้น!
-
โครงสร้างไร้แรงเสียดทาน: แท่นวาง (Stage) ถูกรองรับด้วยแขนกลคู่ขนาน 3 คู่ (Parallel linkages) และแทนที่จะใช้ข้อต่อยืดหยุ่น (Flexures) แบบทั่วไป เค้าเลือกใช้ข้อต่อลูกหมาก (Ball joints) ที่มีก้านยาวมาก เพื่อลดผลกระทบจากความฝืด (Friction) ให้เหลือน้อยที่สุด
-
สมองกลสุดนิ่ง: ใช้บอร์ด Raspberry Pi Pico 2 ควบคุมมอเตอร์ 3 ตัว โดยวงจรต้องออกแบบมา "ห้ามมี" ไอซีที่มีระบบปั๊มประจุ (Charge pumps) หรือสัญญาณนาฬิกา (Clocked logic) เด็ดขาด! เพราะคลื่นรบกวนแค่จิ๊ดเดียว ก็ทำให้สเต็ปเปอร์มอเตอร์กระตุก (Jitter) ได้แล้วครับ!
💡 ป้ายยาไอเทมเด็ด: โปรเจกต์ความแม่นยำสูงระดับนี้ จำเป็นต้องใช้บอร์ดควบคุมที่ทำงานแบบ Real-time และเขียนโค้ดคุมสัญญาณ PWM ได้เนียนกริ๊บ ซึ่ง Raspberry Pi Pico 2 (ชิป RP2350) ตอบโจทย์เรื่องนี้มากๆ!
หากเพื่อนๆ กำลังมองหา บอร์ดพัฒนา Raspberry Pi Pico, Stepper Motor, บอร์ดไดร์ฟมอเตอร์ (Motor Driver) หรือต้องการ บริการรับปริ้นท์ 3D เกรดอุตสาหกรรม แวะมาจัดที่ Globalbyte Shop ได้เลยครับ ทัก LINE OA มาปรึกษาแอดมินก่อนได้ เราพร้อมซัพพอร์ตสายหาทำเสมอ!
เอาไปทำอะไรได้บ้าง? (นอกจากเอามาขิงเพื่อน) 🔬
ในการทดสอบ เค้าลองสั่งให้เครื่องนี้วาดรูปเรือ Benchy (เรือทดสอบปริ้นท์ 3D) แบบย่อส่วนลงมาอยู่ในกรอบสี่เหลี่ยมขนาด 20 ไมโครเมตร! (เล็กกว่าเส้นผมอีก!)
ซึ่งเครื่องระดับนี้สามารถเอาไปต่อยอดทำของแพงๆ ได้เพียบ เช่น:
🔗 ข้อมูลอ้างอิงและโปรเจกต์ที่เกี่ยวข้อง (ตามไปเสพกันต่อ!):
สำหรับใครที่อยากศึกษาเรื่องกลศาสตร์และการคุมมอเตอร์แบบแม่นยำสูง แอดมินแนะนำให้เข้าไปอ่าน Document ใน GitHub เลยครับ เขียนไว้ละเอียดมาก:
⚡ อุปกรณ์พร้อม ไอเดียพร้อม แล้วคุณล่ะพร้อมแหกข้อจำกัดของมอเตอร์หรือยัง? ⚡
*Disclaimer (ข้อจำกัดความรับผิดชอบ): เนื้อหาบทความนี้ถูกเรียบเรียงและสรุปมาจากโปรเจกต์ของต่างประเทศ ข้อมูลการทำงานของระบบ Closed-loop, Magnetic Encoder และการลดสัญญาณรบกวนในวงจร (Noise reduction) มีความซับซ้อนเชิงลึกทางวิศวกรรมมาก ผู้ที่ต้องการใช้งานจริงควรเข้าไปศึกษา
Documentation และโค้ดต้นฉบับ อย่างละเอียด เพื่อความถูกต้องและแม่นยำในการเคลื่อนที่ของอุปกรณ์ครับ!









