ในยุคที่ระบบอัตโนมัติ (Automation) ครองเมือง การสร้าง AI ให้ "มองเห็น" ไม่ใช่เรื่องยากอีกต่อไปครับ แต่การสร้างระบบให้มันมองเห็น ตัดสินใจ และ "ขยับตอบสนองในเสี้ยววินาที" ต่างหากที่เป็นความท้าทายของจริง!
รู้ไหมครับว่าระบบ AI ทั่วไปเวลาเชื่อมต่อกับฮาร์ดแวร์มักจะมี "ความหน่วง (Lag)" เกิดขึ้นเสมอ ยกตัวอย่างเช่น รถยนต์ไร้คนขับ เวลา AI ตรวจเจอคนข้ามถนน มันต้องประมวลผลและส่งสัญญาณไปที่เบรก ซึ่งมักจะใช้เวลาประมาณ 200 มิลลิวินาที (200ms) ลองคิดตามวิชาฟิสิกส์ง่ายๆ ถ้ารถวิ่งมา 60 mph (~27 เมตร/วินาที) รถจะไถลไปไกลถึง 5.4 เมตร ก่อนที่เบรกจะเริ่มทำงานซะอีก!
วันนี้เราเลยจะพามาสร้าง High-speed AI reflex system แบบไม่มีดีเลย์! โดยการผสานพลังของบอร์ด Raspberry Pi 5 , โมเดล AI สุดแรงอย่าง YOLOv8 และ Stepper Motor ที่ขับเคลื่อนแบบ Microstepping ให้กลายเป็นระบบประสาทสั่งการแบบตอบสนองทันที (Near-zero delay) ไม่ต้องพึ่งการ์ดจอ (GPU) ตัวใหญ่ๆ เลยครับ!
ของที่ต้องเตรียม (Supplies)
ก่อนลุย เรามาเตรียมของกันก่อนครับ โปรเจกต์นี้ใช้อุปกรณ์ฮาร์ดแวร์นิดหน่อย แต่ทรงพลังสุดๆ (💡 ป้ายยาเบาๆ: ถ้าเพื่อนๆ ชาว Maker กำลังหาซื้อบอร์ด Raspberry Pi 5 , มอเตอร์สเตปเปอร์, โมดูลกล้อง หรืออยากได้ เส้นพลาสติก 3D Print เกรดวิศวกรรม เอาไปปริ้นท์เคสสวยๆ ไว้เก็บซ่อนสายไฟ แวะไปช้อปปิ้งของดีๆ ได้ที่ Globalbyte เลยครับ มีของพร้อมส่งให้คุณลุยโปรเจกต์ได้ทันที!)
สมองกลหลัก: Raspberry Pi 5 (4GB) พร้อม Micro SD Card (64GB)
ระบบระบายความร้อน: Raspberry Pi 5 Cooling Fan (สำคัญมาก! รัน AI เครื่องจะร้อนจัด ถ้าไม่ติดพัดลมเครื่องจะลดความเร็วลง)
วงจรขับมอเตอร์: DRV8825 Stepper Motor Driver, Breadboard, Jumper wires, และ Capacitor (100uf 35V)
เครื่องมือวัด: Voltage Reader และไขควงหัวแฉกโลหะเล็กๆ (สำหรับจูนโวลต์ไดรเวอร์)
ระบบไฟ: 5V Power Cord สำหรับ Pi และ 12V Power Supply สำหรับมอเตอร์
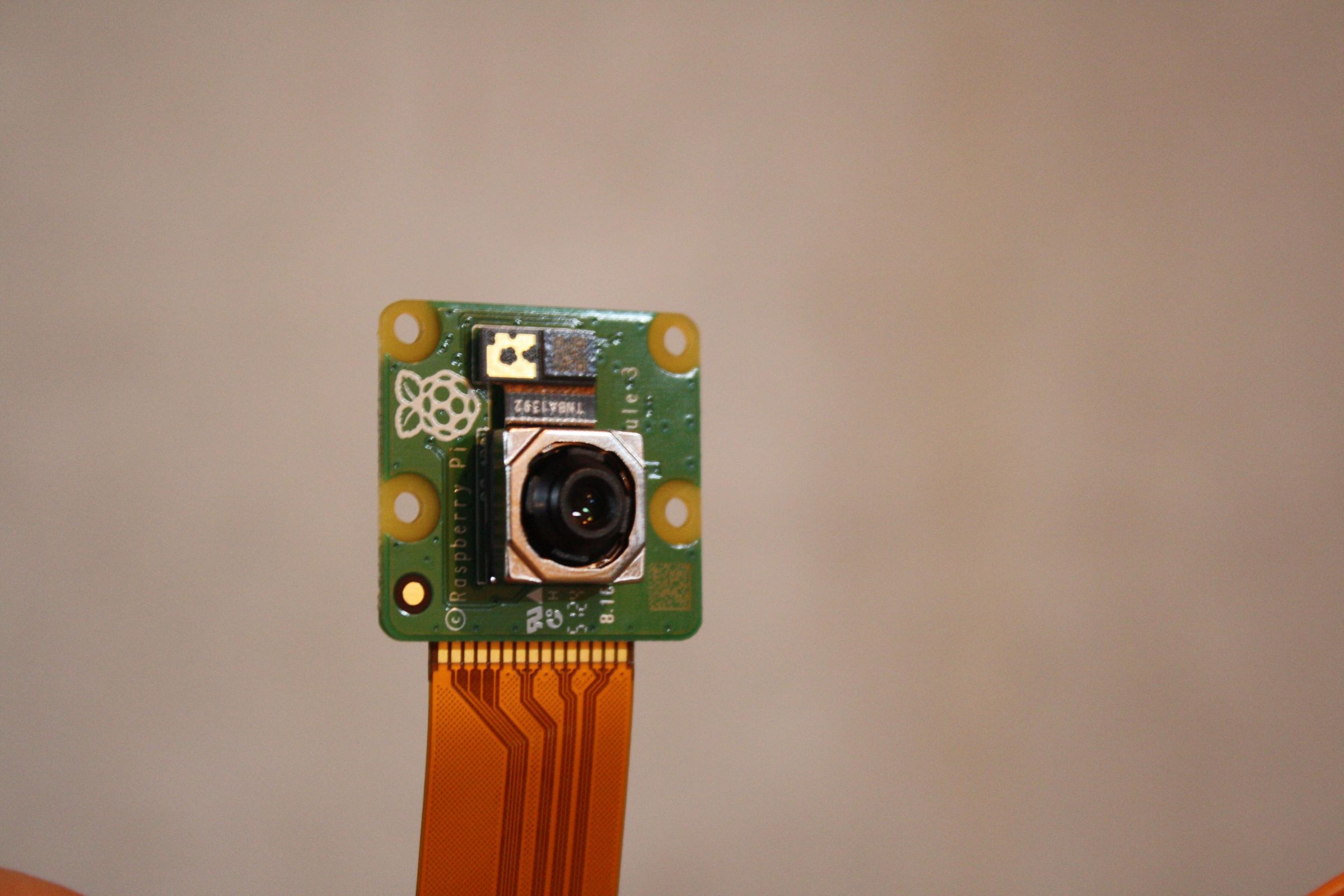
ระบบภาพ: Raspberry Pi Camera Module 3, สาย Micro HDMI, และหน้าจอ/มอนิเตอร์
ระบบกลไก: Nema 17 Stepper Motor (แบบ High torque หรือ Pancake ก็ได้)
Step 1-2: ประกอบร่าง Pi & พัดลมระบายความร้อน
เราจะเริ่มประกอบร่างตอนที่ยังไม่เสียบปลั๊กไฟนะครับ เริ่มจากการต่อ Camera Module 3 เข้ากับ Raspberry Pi ให้งัดคลิปพลาสติกขึ้นเบาๆ เสียบสายแพ (Ribbon cable) เข้าไปให้สุด (หันแถบโลหะเข้าหาเลนส์กล้อง และฝั่งบอร์ดหันเข้าหาพอร์ต USB) แล้วกดคลิปล็อกให้แน่น ระวังสายพับหักด้วยนะครับ
จากนั้นติด Cooling Fan โดยลอกสติกเกอร์ที่แผ่นซิลิโคนระบายความร้อนออก แปะลงบนชิปประมวลผล ขันน็อตยึดพัดลมให้แน่น แล้วเสียบสายไฟเข้ากับพอร์ตพัดลมบนบอร์ด Pi 5
ดูภาพการประกอบกล้องและพัดลม (View more) ซ่อนภาพ (View less)
Step 3-4: ลงระบบปฏิบัติการ (Flashing Raspberry Pi OS)
เราจะทำขั้นตอนนี้บนคอมพิวเตอร์ของคุณครับ ให้โหลดโปรแกรม Raspberry Pi Imager จาก เว็บไซต์ทางการ เสียบ Micro SD Card เข้าคอม เลือก Device เป็น Raspberry Pi 5 และเลือก OS เป็น Raspberry Pi OS (64-bit) เพราะมันเร็วและรัน AI ได้ดีที่สุดครับ (อ่านข้อมูลเพิ่มเติมได้ที่ หน้าคู่มือ )
กด "Write" รอจนเสร็จ แล้วนำ SD Card ไปเสียบใต้บอร์ด Pi 5 เสียบจอ HDMI, คีย์บอร์ด, เมาส์ แล้วจ่ายไฟ 5V ได้เลย บอร์ดจะบูตเข้าสู่หน้าจอ Desktop พร้อมลุย!
ดูภาพการลง OS และการเสียบสาย (View more) ซ่อนภาพ (View less)
Step 5: ลุยโค้ด AI Object Detection (YOLOv8)
เปิด Terminal บน Pi (ไอคอนสี่เหลี่ยมดำๆ บนบาร์) แล้วอัปเดตระบบก่อนเลย: sudo apt update && sudo apt upgrade -y
ทีนี้ Raspberry Pi OS เวอร์ชันใหม่บังคับให้เราใช้ "Virtual Environment" (ระบบจำลองเพื่อไม่ให้ไลบรารีตีกัน) ให้รันโค้ดตามนี้ทีละบรรทัดครับ:
mkdir ~/vision
cd ~/vision
python -m venv yolov8-env
source yolov8-env/bin/activate
pip install ultralytics opencv-python
รอโหลดไลบรารีเสร็จ สร้างไฟล์โค้ดชื่อ detect_v8.py ด้วยคำสั่ง nano detect_v8.py แล้วก๊อปปี้โค้ดทดสอบกล้องด้านล่างนี้ไปวางเลยครับ!
from ultralytics import YOLO
from picamera2 import Picamera2
import cv2
import numpy as np
import time
print("Starting YOLOv8...")
model = YOLO("yolov8n.pt")
print("Starting Picamera2...")
picam2 = Picamera2()
config = picam2.create_preview_configuration(main={"format": "RGB888", "size": (640, 480)})
picam2.configure(config)
picam2.start()
prev_frame_time = 0
new_frame_time = 0
print("Camera started. Press 'q' to quit.")
try:
while True:
frame = picam2.capture_array()
frame = frame[:, :, :3]
results = model(frame, verbose=False, conf=0.5, iou=0.45)
annotated_frame = results[0].plot()
new_frame_time = time.time()
if (new_frame_time - prev_frame_time) > 0:
fps = 1 / (new_frame_time - prev_frame_time)
else:
fps = 0
prev_frame_time = new_frame_time
cv2.putText(annotated_frame, f"FPS: {int(fps)}", (20, 50),
cv2.FONT_HERSHEY_SIMPLEX, 1, (0, 255, 0), 2)
cv2.imshow("YOLOv8 Detection", annotated_frame)
if cv2.waitKey(1) & 0xFF == ord("q"):
break
finally:
picam2.stop()
cv2.destroyAllWindows()
print("Camera stopped.")
ดูโค้ดทั้งหมด (View full code) ซ่อนโค้ด (View less)
กด Ctrl + X กด Y แล้ว Enter เพื่อเซฟไฟล์ แล้วสั่งรันด้วยคำสั่ง python detect_v8.py ถ้าคุณเห็นกรอบสี่เหลี่ยมขึ้นครอบตัวคุณ (Label ว่า "Person") ถือว่า AI ทำงานผ่านแล้วครับ!
Step 6-7: ต่อวงจรและจูนโวลต์มอเตอร์ (Circuit & Voltage Limit)
⚠️ คำเตือนสำคัญ: ถอดปลั๊กไฟออกให้หมดก่อนต่อวงจร!
ไดรเวอร์ DRV8825 ถ้าแกะกล่องมาแล้วต่อเลย มันจะร้อนจนไหม้! คุณต้องปรับ Voltage Limit ให้เหมาะกับมอเตอร์ก่อน โดยสูตรคือ โวลต์ = ครึ่งหนึ่งของแอมป์มอเตอร์ (เช่น มอเตอร์ 2.0A = ลิมิต 1.0V แต่ตั้งไว้ที่ 0.6V ก็พอเพื่อความปลอดภัยไม่ให้ร้อนเกิน)
*อย่าเสียบ Capacitor กลับขั้วเด็ดขาด (แถบขาวคือขั้วลบ) ไม่งั้นระเบิดแน่! และอย่าลืมต่อสายจัมเปอร์สั้นๆ ระหว่างพิน RESET กับ SLEEP ด้วยนะครับ
จ่ายไฟ 5V ให้ Pi และ 12V ให้วงจร เอา Multimeter วัดโวลต์ (ขั้วบวกจิ้มที่น็อตบนไดรเวอร์, ขั้วลบจิ้ม GND) แล้วค่อยๆ หมุนไขควงจนได้ 0.6V จากนั้นค่อยเสียบสายมอเตอร์เข้าพอร์ต A1, A2, B1, B2 และต่อสาย Microstepping (M0, M1, M2) เข้า Pi ครับ
ดูภาพการต่อวงจรและวัดโวลต์ (View more) ซ่อนภาพ (View less)
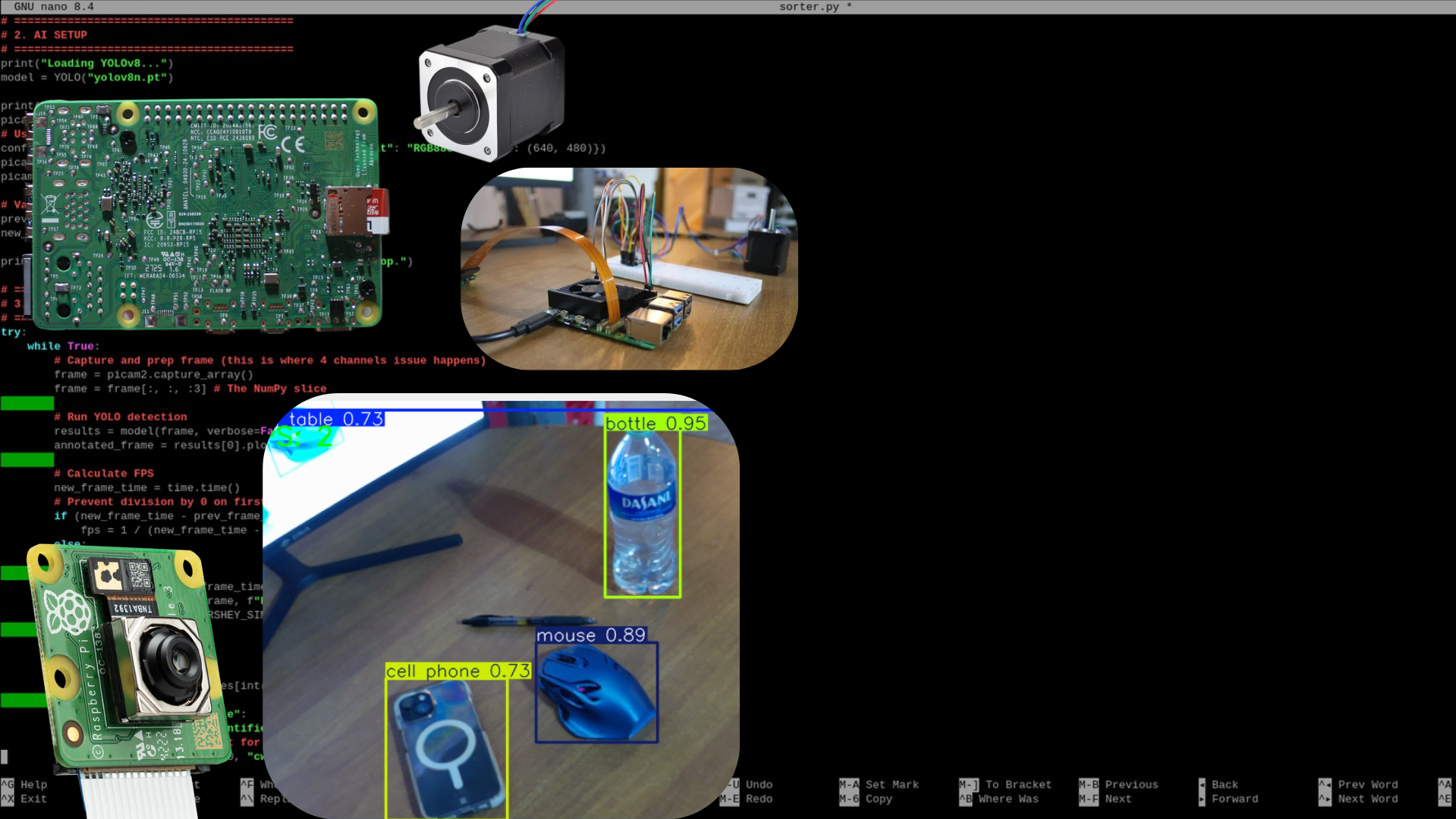
Step 8: โค้ดร่างสมบูรณ์ AI สั่งมอเตอร์! (AI to Motor Code)
ใน Terminal ให้รัน pip install gpiozero lgpio เพื่อลงไลบรารีคุมพินมอเตอร์ สร้างไฟล์ nano rapid_response.py แล้วแปะโค้ดนี้ลงไปเลยครับ:
import cv2
import numpy as np
import time
from ultralytics import YOLO
from picamera2 import Picamera2
from gpiozero import OutputDevice
from time import sleep
# --- HARDWARE SETUP ---
step_pin = OutputDevice(21)
dir_pin = OutputDevice(20)
m0_pin = OutputDevice(14, initial_value=True)
m1_pin = OutputDevice(15, initial_value=True)
m2_pin = OutputDevice(18, initial_value=True)
current_pos = 0
def spin_degrees(degrees, direction="cw"):
global current_pos
steps_needed = int((degrees / 360.0) * 200 * 32)
dir_pin.value = 1 if direction == "cw" else 0
for _ in range(steps_needed):
step_pin.on()
sleep(0.0005)
step_pin.off()
sleep(0.0005)
current_pos += steps_needed if direction == "cw" else -steps_needed
def return_home():
global current_pos
if current_pos == 0: return
dir_pin.value = 0 if current_pos > 0 else 1
for _ in range(abs(current_pos)):
step_pin.on()
sleep(0.0005)
step_pin.off()
sleep(0.0005)
current_pos = 0
# --- AI SETUP ---
model = YOLO("yolov8n.pt")
picam2 = Picamera2()
config = picam2.create_preview_configuration(main={"format": "RGB888", "size": (640, 480)})
picam2.configure(config)
picam2.start()
try:
while True:
frame = picam2.capture_array()
frame = frame[:, :, :3]
results = model(frame, verbose=False, conf=0.5, iou=0.45)
annotated_frame = results[0].plot()
for r in results:
for box in r.boxes:
label = model.names[int(box.cls[0])]
if label == "bottle":
print(">>> Identified BOTTLE (Right 90°)")
spin_degrees(90, "cw")
sleep(5)
return_home()
elif label == "cell phone":
print(">>> Identified PHONE (Left 90°)")
spin_degrees(90, "ccw")
sleep(5)
return_home()
cv2.imshow("Pi 5 AI", annotated_frame)
if cv2.waitKey(1) & 0xFF == ord("q"):
break
finally:
return_home()
picam2.stop()
step_pin.off()
cv2.destroyAllWindows()
ดูโค้ดทั้งหมด (View full code) ซ่อนโค้ด (View less)
โค้ดนี้ทำงานง่ายๆ คือ: ถ้า AI เจอ "ขวดน้ำ (Bottle)" มอเตอร์จะหมุนขวา 90 องศา ค้างไว้ 5 วินาทีแล้วกลับมาที่เดิม แต่ถ้าเจอ "มือถือ (Cell phone)" จะหมุนซ้าย 90 องศาแทน ลองสั่ง python rapid_response.py แล้วหยิบขวดน้ำมาโชว์หน้ากล้องดูครับ มอเตอร์จะขยับแบบแทบไม่มีดีเลย์เลย!
สรุปผลลัพธ์และไอเดียต่อยอด (Conclusion)
ความสำเร็จของโปรเจกต์นี้ไม่ใช่แค่เรื่อง AI รู้จักขวดน้ำนะครับ แต่คือการที่เราสร้าง "ระบบประสาทอัตโนมัติ" ที่เชื่อมสมอง (Pi 5 + YOLOv8) เข้ากับกล้ามเนื้อ (Stepper Motor) ได้อย่างรวดเร็ว (High-speed AI response) ไม่ต้องพึ่งเซิร์ฟเวอร์คลาวด์ ไม่ต้องส่งข้อมูลไปกลับให้เสียเวลา
คุณสามารถเอาโค้ดนี้ไปดัดแปลงทำ กล้องวงจรปิดหมุนตามคน, ประตูปลดล็อกเฉพาะหน้าเจ้าของ, หรือหุ่นยนต์คัดแยกขยะอัตโนมัติ ได้สบายๆ เลยครับ! ลุยเลยชาว Maker!
*คำเตือน: เนื้อหานี้เป็นการสรุปและเรียบเรียงแนวคิดจากบทความโปรเจกต์ต้นฉบับภาษาอังกฤษ ข้อมูลฉบับภาษาไทยและโค้ดบางส่วนอาจถูกปรับให้เข้าใจง่ายขึ้น โปรดตรวจสอบรายละเอียดและข้อควรระวังในการต่อวงจรไฟฟ้าได้ที่
เว็บไซต์ต้นฉบับ